
U of M licenses technology to monitor crop nitrogen to ag-tech firm Sentera
Feb. 27, 2018
Sentera, a Minneapolis-based supplier of technology solutions to the agriculture industry, has signed an agreement to bring University of Minnesota-developed corn nitrogen deficiency technology to the market...
read the article
$10M in private support will fund new robotics labs
June 21, 2017
Work will begin this winter on renovating the first two floors of Shepherd Laboratories building for robotics research, thanks to $10M in private support.
read the article
Lab Featured in RCJudge
May 11, 2017
Dr. Nikolaos Papanikolopoulos, is the director of the Center for Distributed Robotics in Minnesota. He along with several others work on specialized robots which can adapt to their surroundings
read the article
SUAV:Q featured in New Scientist
February 24, 2017
A shape-shifting drone takes off like a helicopter and transforms into a plane in mid-air to fly all day on solar power. The drone is designed to provide affordable aerial surveys for farmers, so they can see where to irrigate and use fertiliser and herbicide only where needed.
read the article
Lab Director Awarded McKnight Professorship
August 22, 2016
Department of Computer Science and Engineering Professor Nikolaos Papanikolopoulos has been awarded the prestigious McKnight Presidential Professorship by University President Eric Kaler. The professorship is among the highest honors for faculty at the University.
read the article
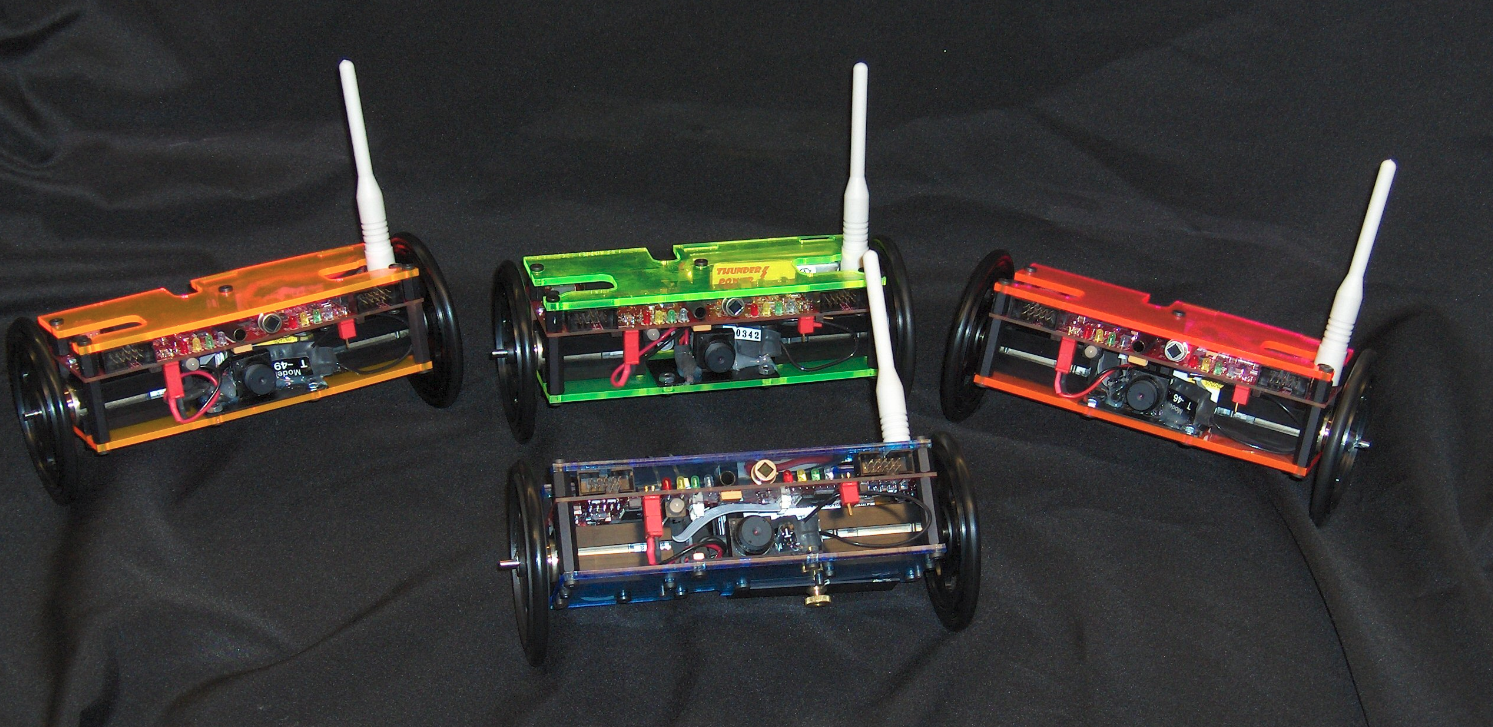
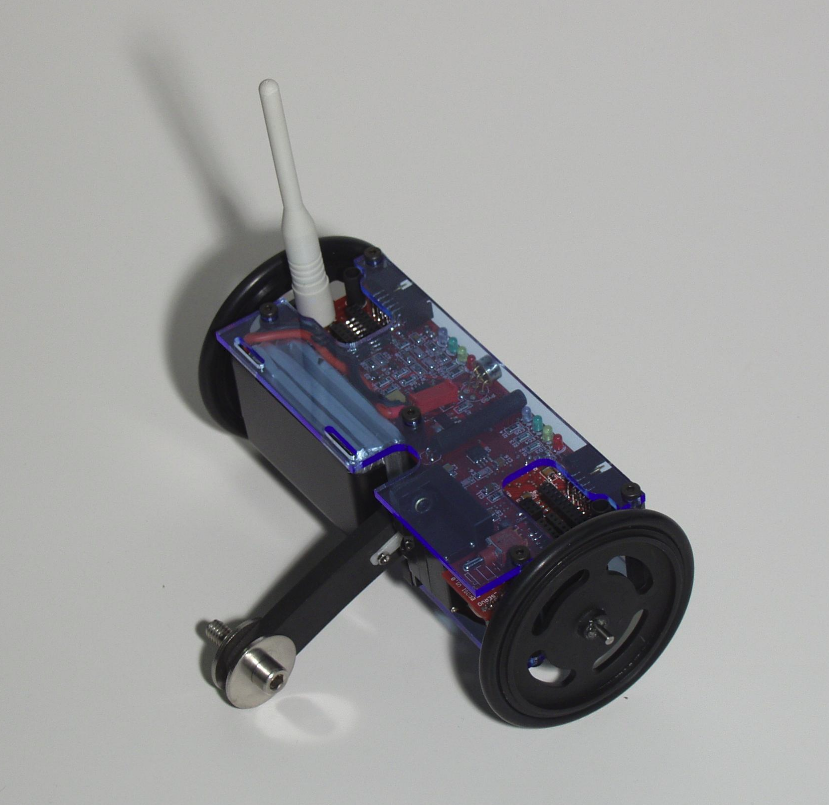
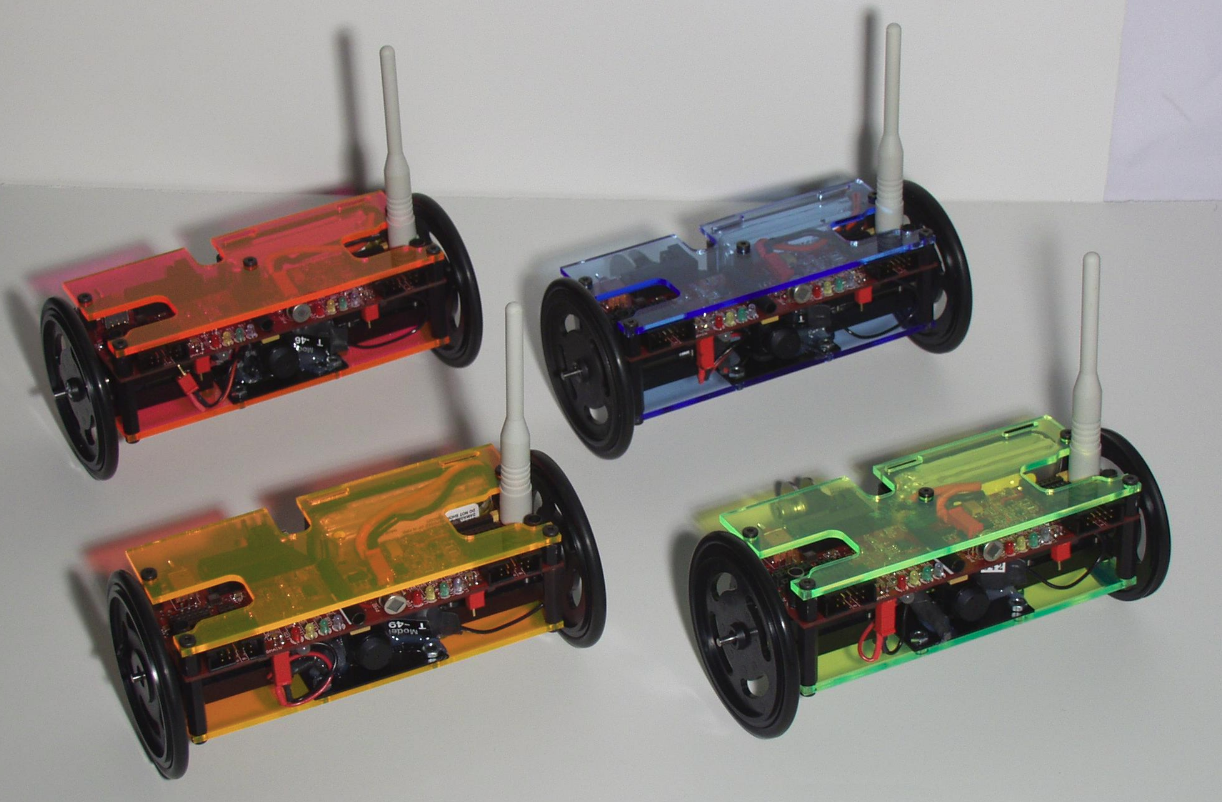
The eROSI (educational, Research-Oriented, Sensing, Inexpensive) robot is a robotic platform which balances ease of use with expandability to provide a platform which will arouse the interest of novice roboticists while remaining an adaptable research platform for the advanced scientist.





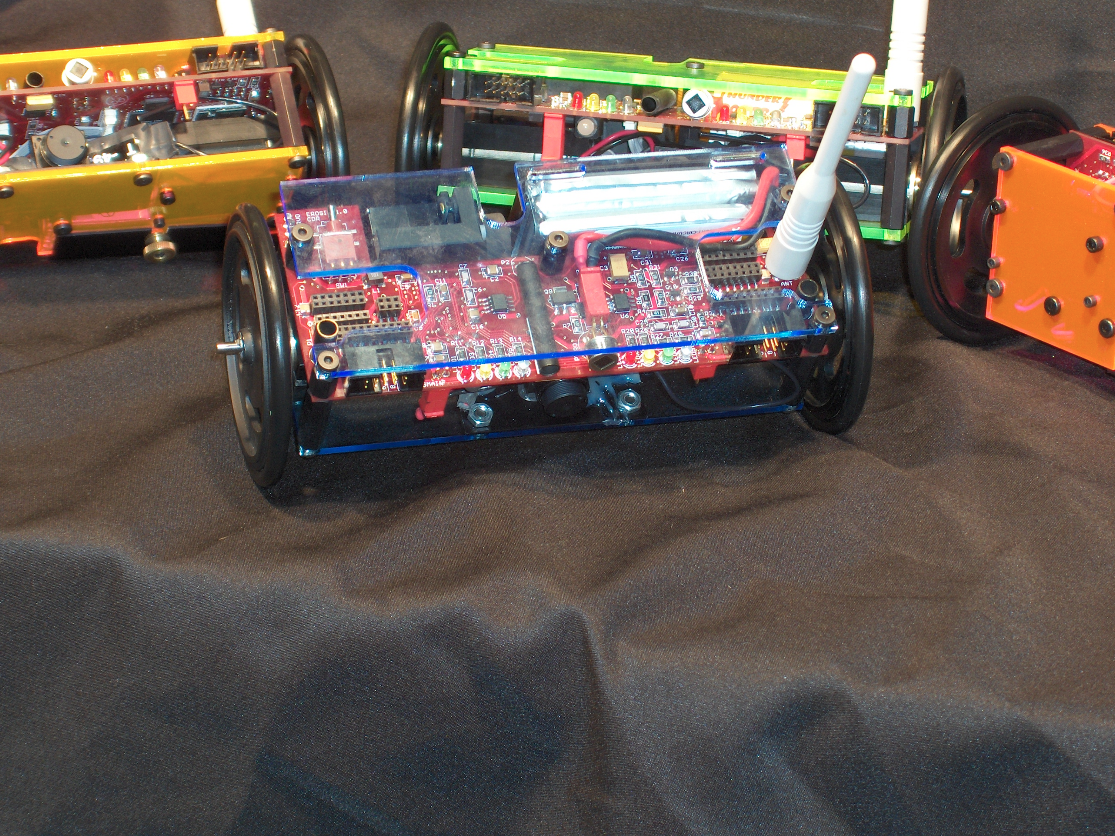
The eROSI is not only mechanically appealing, but is also intended to be visually stimulating in order that students who might be intimidated by the traditional commercially-available black magic box will become more comfortable with the robot's internal physical design. The inner workings of the robot are covered only by translucent plastic allowing students to see the inner components but protecting these components from static and other minor mishaps. Easily visible LEDs can be used to teach about digital signals or for debugging code, but most importantly provide students with an easy and obvious communication method.
The eROSI is equipped with photovoltaic sensors that give light levels, a pyroelectric sensor that can sense moving heat, and a two axis accelerometer. The differential drive mechanics provide students and researchers with an easily controllable platform complete with encoders for odometry-based experiments.
Bluetooth (TM) is used for communication between robots as well as with workstations. The potential also exists for interaction between eROSIs and virtually any Bluetooth (TM) enabled device such as a cellular phone. Although Bluetooth has a fairly short range as compared with other communications protocols, it has several advantages which make it appropriate for a robot used in education. It is well supported by most operating systems including Mac-based systems, Windows, and Linux which gives roboticists the freedom to work within the environment where they are most comfortable. Additionally, Bluetooth allows for easy point to point communications as well as ad hoc networks. Students can move from a simple topology of one robot and one workstation to collaborative team-based communication.
Forward facing pyroelectric sensor
Upward facing photovoltaic sensor
Left and right forward facing photovoltaic sensors
Analog camera with transmitter
Dual axis accelerometer
Quadrature encoders
Loren Fiore, Guruprasad Somasundaram, Andrew Drenner and Nikolaos Papanikolopoulos, "Optimal camera placement with adaptation to dynamic scenes" Proceedings of the 2008 IEEE Conference on Robotics and Automation, Pasadena, CA, May 19-23, 2008. Pages: 956-961.
Hyeun Jeong Min, Andrew Drenner, and Nikolaos Papanikolopoulos, "Autonomous docking for an eROSI robot based on a vision system with points clustering" Proceedings of the 2007 Mediterranean Conference on Control & Automation, Athens, Greece, 2007