
U of M licenses technology to monitor crop nitrogen to ag-tech firm Sentera
Feb. 27, 2018
Sentera, a Minneapolis-based supplier of technology solutions to the agriculture industry, has signed an agreement to bring University of Minnesota-developed corn nitrogen deficiency technology to the market...
read the article
$10M in private support will fund new robotics labs
June 21, 2017
Work will begin this winter on renovating the first two floors of Shepherd Laboratories building for robotics research, thanks to $10M in private support.
read the article
Lab Featured in RCJudge
May 11, 2017
Dr. Nikolaos Papanikolopoulos, is the director of the Center for Distributed Robotics in Minnesota. He along with several others work on specialized robots which can adapt to their surroundings
read the article
SUAV:Q featured in New Scientist
February 24, 2017
A shape-shifting drone takes off like a helicopter and transforms into a plane in mid-air to fly all day on solar power. The drone is designed to provide affordable aerial surveys for farmers, so they can see where to irrigate and use fertiliser and herbicide only where needed.
read the article
Lab Director Awarded McKnight Professorship
August 22, 2016
Department of Computer Science and Engineering Professor Nikolaos Papanikolopoulos has been awarded the prestigious McKnight Presidential Professorship by University President Eric Kaler. The professorship is among the highest honors for faculty at the University.
read the article
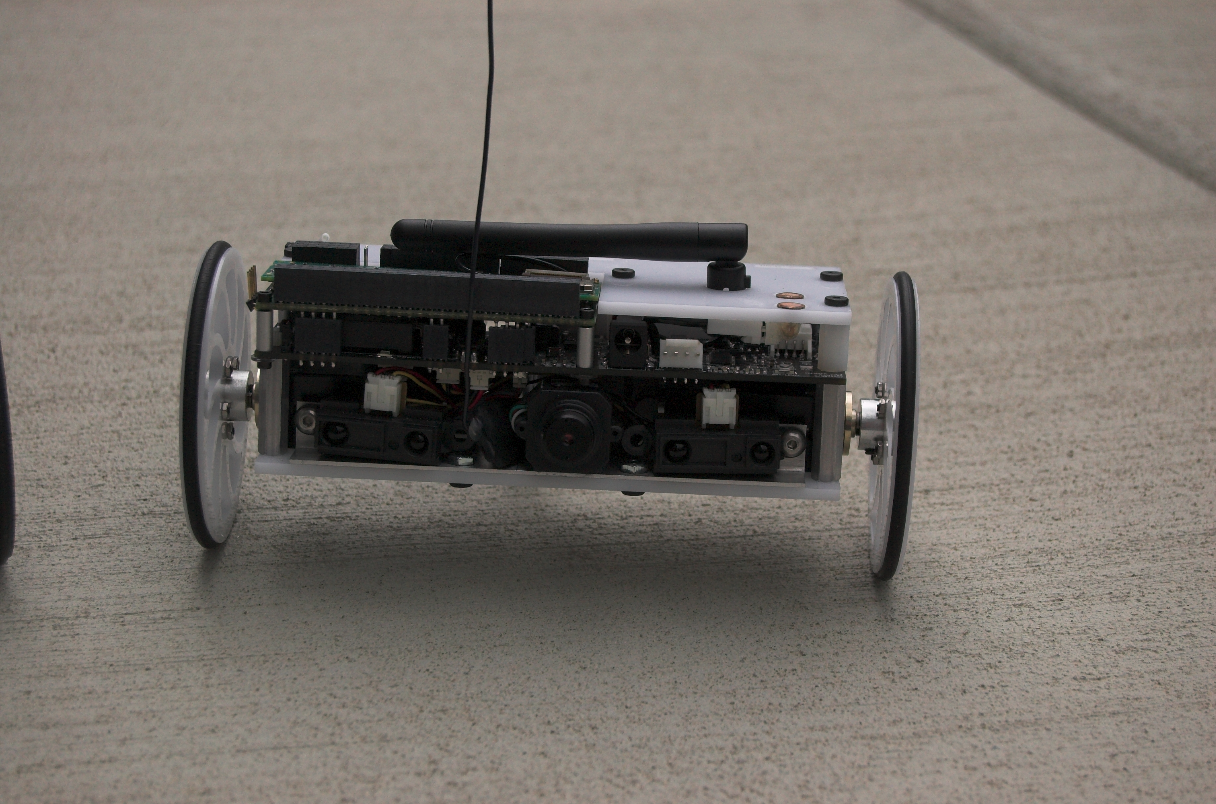
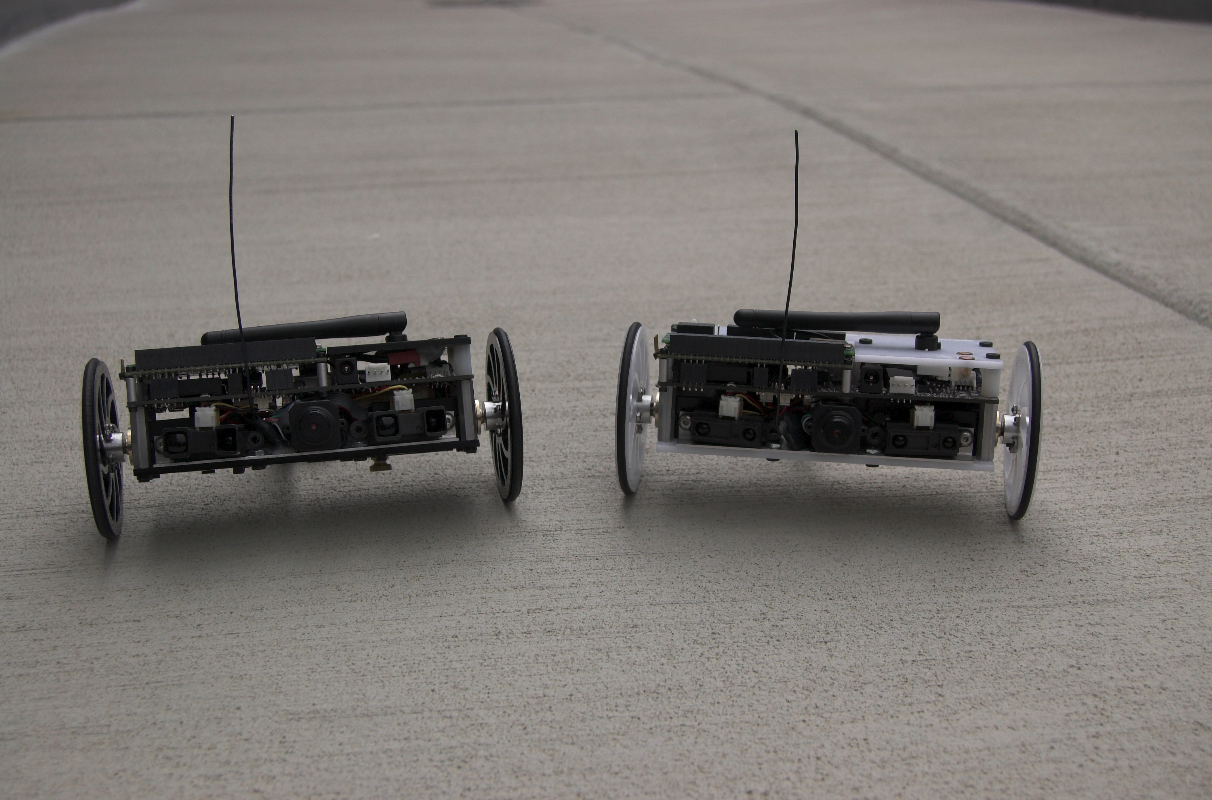
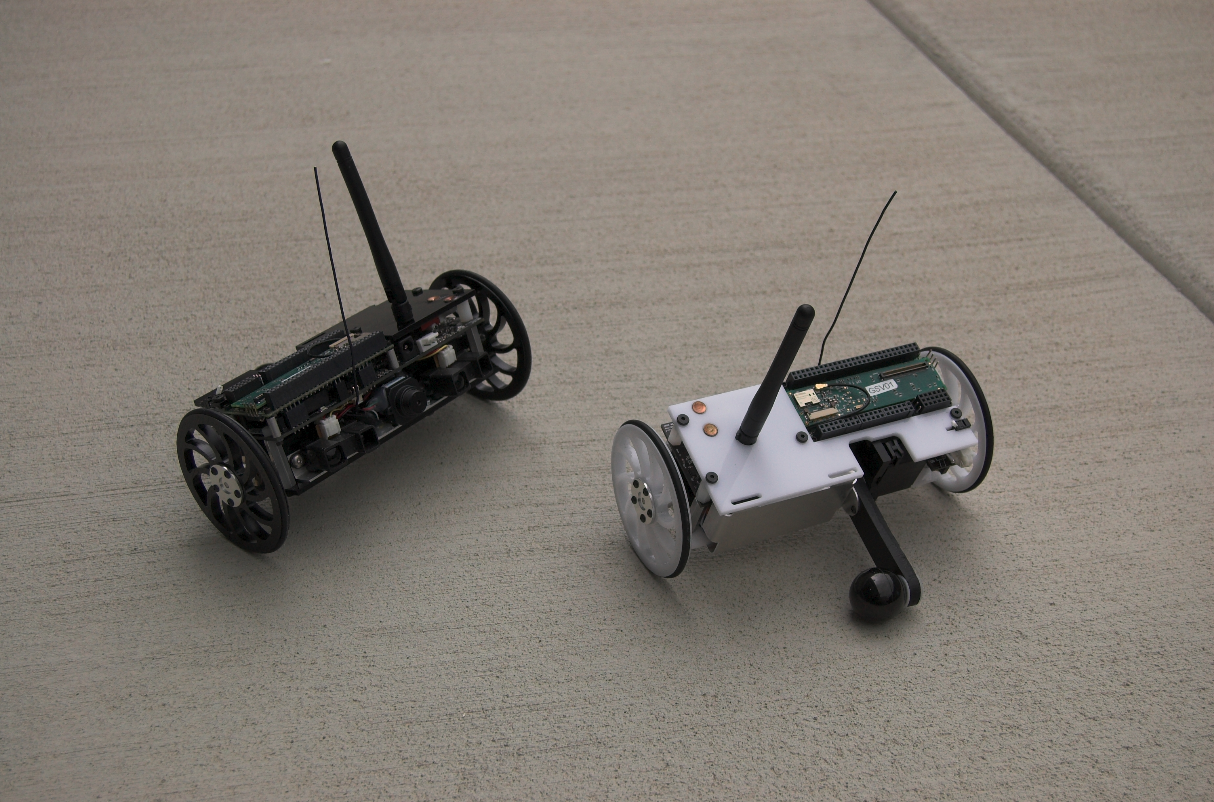
The Explorer robot was designed to provide research scientists with an advanced, safe, and easy to use mobile robotic platform. While it may look deceptively similar to its predecessor, the eROSI, it is different in all aspects of design - from the mechanical structure and electrical hardware, to its software processing capabilities.
The Explorer robot has a specially designed power management system developed to provide a virtual gas gauge with respect to available power. In addition, there is integrated battery management and charging capabilities. Combined, these compatibilities allow the Explorer to autonomously recharge itself within the Docking Bay.
Length: 140 mm
Width: 60 mm
Height: 45 mm
Sensors: Analog Camera with Transmitter
Wheel Encoders
Dual axis accelerometer
Computation: 400 MHz Verdex Gumstix
Operational Lifetime/Power: 1320 mAh LiPoly Battery
Full Speed: ~180 minutes
Qingquan Zhang, Gerald Sobelman, and Tian He, "Gradient-Based Target Localization in Robotic Sensor Networks" The Pervasive and Mobile Computing Journal, Volume 5, 2009.
Monica Anderson and Nikolaos Papanikolopoulos,"Implicit Cooperation Strategies for Multi-robot Search of Unknown Areas" Journal of Intelligent and Robotic Systems, Volume 53, 2008
Loren Fiore, Duc Fehr, Robot Bodor, Andrew Drenner, Guruprasad Somasundaram, and Nikolaos Papanikolopoulos, "Multi-Camera Human Activity Monitoring" Journal of Intelligent and Robotic Systems, Vol. 52, 2008.
Apostolos Kottas, Andrew Drenner, and Nikolaos Papanikolopoulos, "Intelligent Power Management: Promoting Power-Consciousness in Teams of Mobile Robots" Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA), 2009.
Hyeun Jeong Min, Andrew Drenner, and Nikolaos Papanikolopoulos, "Vision-based Leader-Follower Formations with Limited Information" Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA), 2009.
Loren Fiore, Guruprasad Somasundaram, Andrew Drenner, and Nikolaos Papanikolopoulos, "Optimal Camera Placement with Adaptation to Dynamic Scenes" Proceedings of the 2008 IEEE International Conference on Robotics and Automation (ICRA), 2008.