The MegaScout is a wholly new robot platform developed at the University of Minnesota to work in conjunction with a Scout team. The MegaScout is intended to provide command and control support for a Scout team as well as perform independently. The MegaScouts are still in their early prototyping stages, and more information will be provided as it becomes available.
Specifications
| Length: |
37 cm |
| Diameter: |
13 cm (main body) |
| Weight: |
12 kg |
| Top Speed: |
Standard wheel 5.3 m/s
Balloon wheel 7.2 m/s
Actuated wheel ??? m/s
|
| Sensors: |
Color Tilt Camera
Color USB Camera
Eltec Pyroelectric Sensor
GP2D02 Range Finder
|
| Batteries: |
250 Wh Lithium Polymer |
| Operational Lifetime: |
Quiescent Mode: approx. 20 hours
Reconnaissance Mode: approx. 5-7.5 hours
|
| Communications: |
Primary: 802.11b
Optional: 900Mhz FM Video |
Variations
 |
A standard equipped MegaScout |
 |
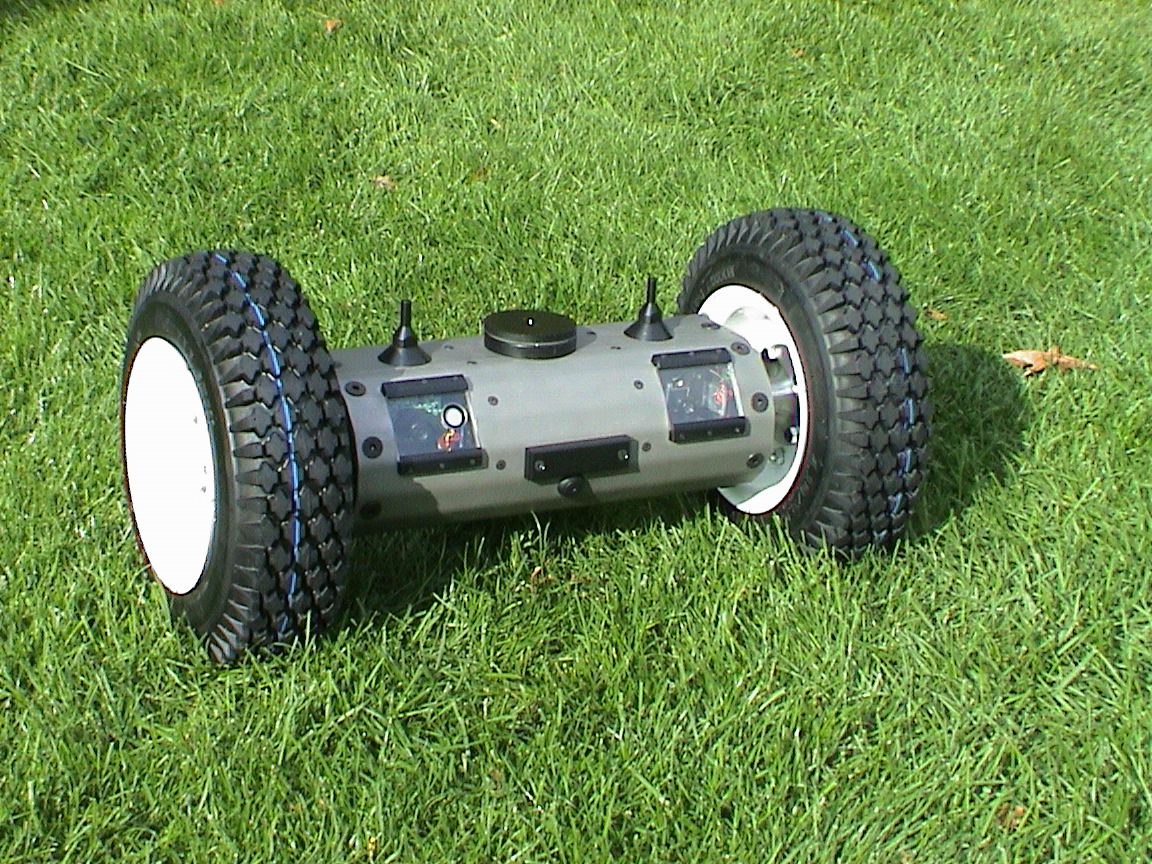
A MegaScout equipped with rugged tires for increased shock absorption and traction |
 |
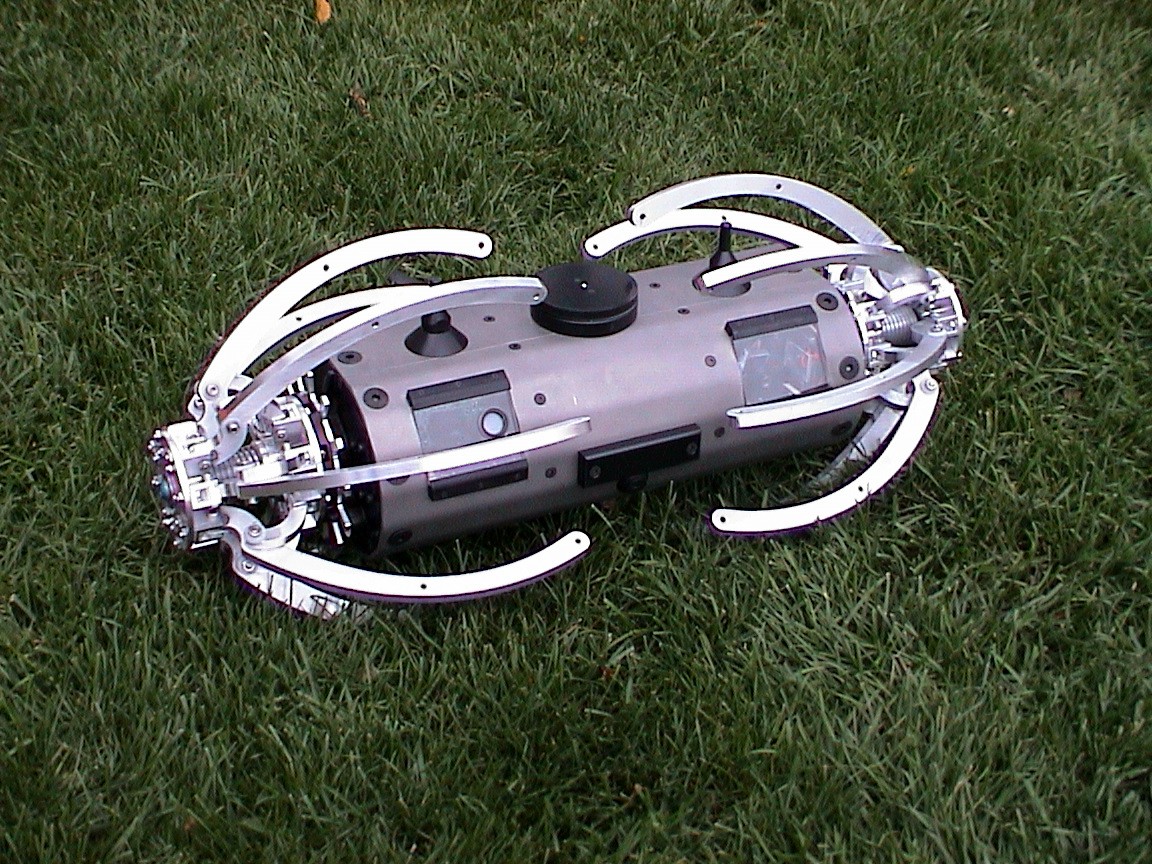
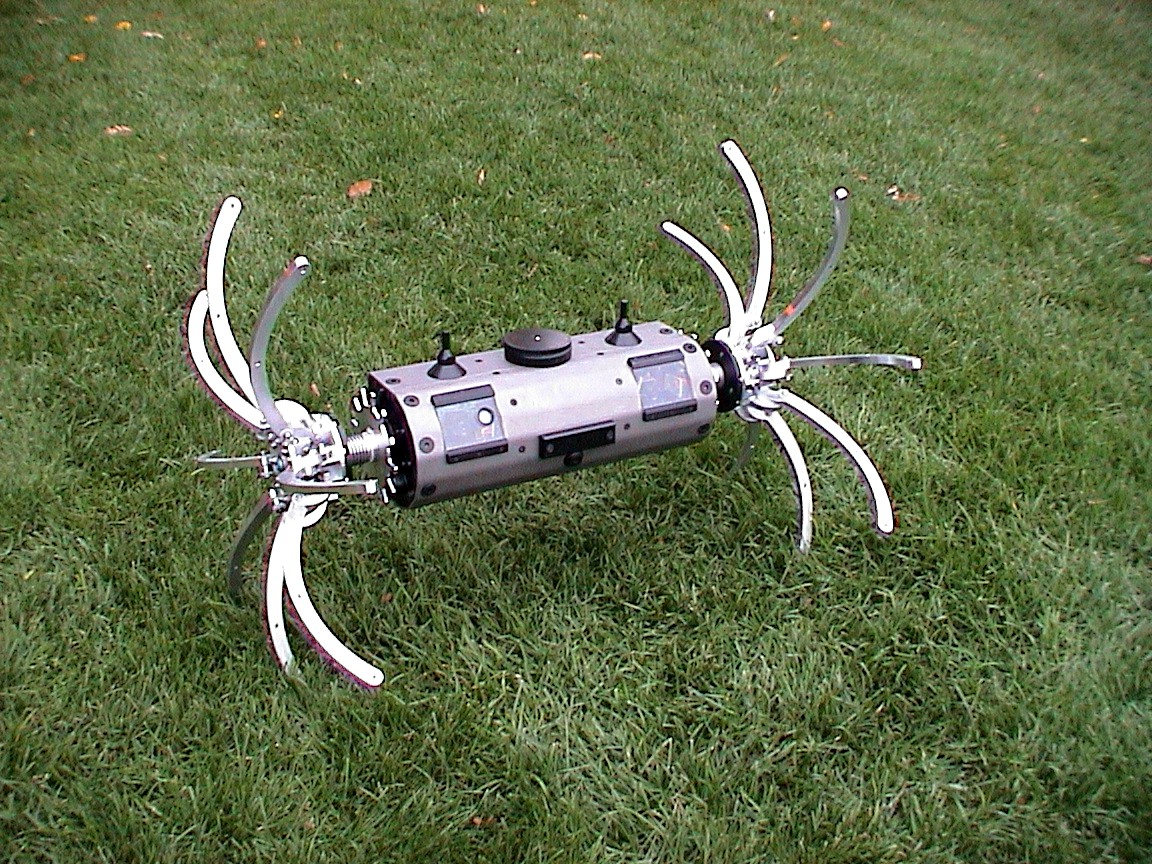
A MegaScout equipped with actuating wheels |
Demos

The MegaScout in action.
(18MB mpeg)
|

The MegaScout taking 6 consecutive falls with no damage.
(12.5MB mpeg) |

A rendered image of the MegaScout.
(800K mpeg)
|

MegaScout moving up a steep incline.
(6MB mpeg) |

MegaScout moving at high velocity.
(6MB mpeg) |

Two teleoperated MegaScouts.
(9MB mpeg) |

Video from a MegaScout camera.
(786K mpeg)
|

A MegaScout demonstrating its pulling power.
(1.5MB mpeg)
|
Images
PublicationsBradley Kratochvil, Ian T. Burt, Andrew Drenner, Derek Goerke,
Bennett Jackson, Colin McMillen, Christopher Olson, Nikolaos
Papanikolopoulos, Adam Pfeifer, Sascha A. Stoeter, Kristen Stubbs,
David Waletzko. "Heterogeneous Implementation of an Adaptive Robotic
Sensing Team." Proceedings of the IEEE International Conference on
Robotics and Automation, Taipei, Taiwan, May 2003.
|